【受付時間】 10:00〜18:00(土日祝日を除く)
IMU タクティカルグレード 事例 | 株式会社ナノシード

【受付時間】 10:00〜18:00
(土日祝日を除く)
大学・研究機関向けプロジェクトの事例
Inertial Senseは大学・研究機関に多くの顧客を持っています。創設者が、ブリガム・ヤング大学(Brigham Young University)のMAGICC研究所での研究プロジェクトに基づいたドローンオートパイロットを開発したのが当社の始まりです。このような背景により、その研究を支援することに親近感を持っています。自律型ロボットアプリケーションに関してサポートした研究者の方々を紹介します。
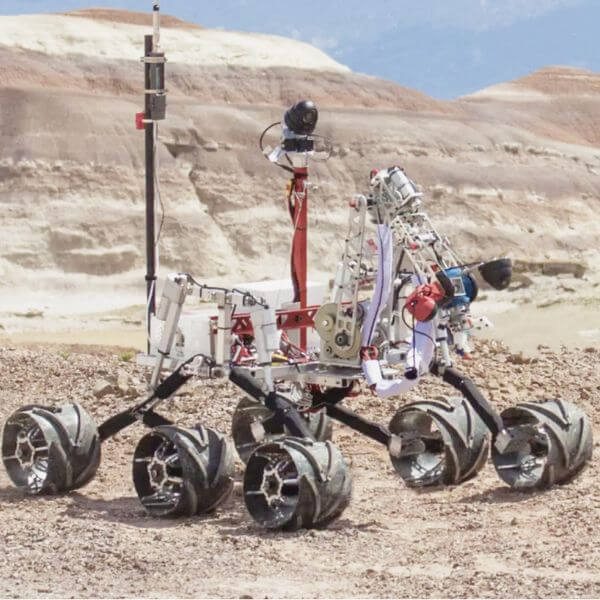
【ブリガム・ヤング大学】火星探査車
ブリガム・ヤング大学の火星探査車チームは、2017年と2018年のURCコンペティション(大学ローバーチャレンジ)において、Inertial SenseのμINSを使用しました。この国際ロボットコンペティションは非常に競争が激しく、毎年90を超える申請者の中から選ばれた36チームが参加します。BYUの探査車は、フィールドのGPS地点間を自律ナビゲートし、ロッキー山脈を横断しました。2018年には、チームは自律山脈横断タスクで1位を獲得しました。

【カリフォルニア大学 バークレー校】カルフォルニア大学での自律走行(AMAC)
UCバークレーチームは初期プロジェクトとして一から1/8スケールの自律RC自動車を製作しました。彼らの目標は、車両がキャンパス周りの様々な地形の複数の顕著なルートを航行することでした。これらの車は、耐久性があり、適応性があり、機敏であることが必要です。最終的な目標は、移動ロボット群によるマルチエージェント協力です。
慣性ナビゲーションシステム(INS)は、走行距離計測法のメッセージ「odom」から変換された特有のメッセージタイプ「INS」を発行します。ROSパッケージのgmappingは、2D LaserScanとオドメトリーメッセージで5DOF SLAMを使用して、占有グリッドでデータを公開し、環境内の相対位置を決定しています。また、INSをAckermannステアリングモデルと組み合わせて使用し、車が移動する際の位置を決定しています。

【ウィスコンシン大学】火星探査車
ウィスコンシンロボットチームはロボットアプリケーションで長年の経験を有しています。彼らは最近、特定のGPS場所に航行し、テニスボールを取得するタスクである大学探査車チャレンジに参加しました。このチームのナビゲーションコンポーネントのコアは、uINSセンサーです。
IMX-5 事例のご紹介

お客様用ご相談/お問い合わせ
製品に関するご相談、デモ機器、お見積・納期などに関して お気軽に問い合わせ下さい
※は入力必須項目となります。
INFORMATIONお知らせ
-
2024.02.01
新製品
-
2023.12.01
新製品
-
2023.08.21
新製品
-
2023.05.15
新製品
-
2022.11.14
新製品